
Introdução — Visão geral da Placa de Controle de Movimento 4 Eixos ICP DAS
A placa de controle de movimento 4 eixos da ICP DAS é um controlador embarcadoPCI/PCIe/USB (ou modelo embarcado para rack) projetado para aplicações de alta precisão em automação industrial, integração de máquinas e sistemas IIoT. Neste artigo você encontrará descrição objetiva do produto, conceitos fundamentais e contexto de uso, incluindo parâmetros críticos como resolução de posicionamento, determinismo e requisitos elétricos. Palavras-chave: placa de controle de movimento 4 eixos, controle de movimento, ICP DAS.
O que é a placa: trata‑se de um controlador de movimento multieixo que gera perfis de velocidade/posição, interfaces pulse/dir e suporta encoders incrementais/absolutos, com I/Os digitais/analógicos para coordenação com PLCs e drives. Suas principais funções incluem sincronização de eixos, interpolação linear/circular, homing e proteção de limites. O público-alvo são engenheiros de automação, integradores de sistemas, profissionais de TI industrial e compradores técnicos.
Resumo rápido das capacidades técnicas: suporte a até 4 eixos sincronizados, resolução de até 0,01 µm (via interpolação fina e encoders de alta contagem), latência determinística 100.000 h (estimado) | Condições típicas de operação |
Explicações detalhadas: a resolução efetiva depende do encoder e do modo de contagem (x1, x2, x4). As interfaces Pulse/Dir oferecem compatibilidade direta com a maioria dos drives, enquanto saídas analógicas +/-10 V são úteis para drives analógicos ou controle de velocidade. A placa incorpora isolamento e filtros para mitigar ruído e garantir integridade de sinal em ambientes industriais.
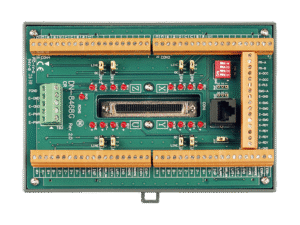
Pinout, interfaces físicas e requisitos elétricos
Mapa de conectores: tipicamente conectores DB25/terminal block para I/Os, conector de alimentação 3 pinos para 24 V DC, e conectores RJ45/HD para comunicação série ou Ethernet dependendo da versão. Sinais críticos incluem PulseA/PulseB, Dir, Enable, Encoder A/B/Z, Home, e limites hardware.
Proteções recomendadas: fusíveis rápidos na alimentação principal, varistores e supressores de transientes (TVS) nas linhas de encoder, e isolamento galvânico entre a placa e fontes de alto ruído. Exemplo de cabeamento: usar pares trançados e malha de aterramento separada para encoders RS422; manter distância entre cabos de potência e cabos de sinal.
Requisitos elétricos: alimente com fonte estabilizada 24 V DC com ripple inferior a 100 mVpp; para sistemas com PFC (Power Factor Correction) e alimentação AC, utilize PSUs compatíveis IEC/EN 62368-1. Considere MTBF e redundância para aplicações críticas em utilities.
Compatibilidade de firmware e versões de driver
Versões suportadas: a ICP DAS publica firmwares e SDKs compatíveis por geração de produto; verifique a matriz de compatibilidade no datasheet e notas de release. Atualizações podem incluir melhorias em determinismo, correções de segurança e novos comandos de interpolação.
Notas de atualização: antes de atualizar, sempre faça backup da configuração, documente versões de driver do host e valide em bancada. Ferramentas de validação permitem comparar checksums do firmware e checar logs após atualização para identificar regressões.
Como validar compatibilidade: testar em bancada com um servo/stepper conhecido, executar perfis de referência (jog, homing, interpolação) e medir latência via scope/logic analyzer. Consulte também exemplos e SDKs disponíveis em fornecedores e no blog da LRI para integração prática.
Importância, benefícios e diferenciais do produto | placa de controle de movimento 4 eixos
Benefícios técnicos: precisão de movimento, determinismo temporal e capacidade de interpolação multi-eixo permitem movimentos suaves e repetíveis. Controle fino de ganho, aceleração e “jerk” reduz vibrações e aumenta vida útil de mecânica e ferramentas. MTBF elevado e conformidade EMC reduzem intervenções corretivas.
Diferenciais comerciais: suporte técnico local (ICP DAS/LRI), documentação técnica completa e disponibilidade de peças sobressalentes reduzem o TCO. Comparado a concorrentes, a robustez em ambientes industriais e opções de integração direta com protocolos industriais são argumentos fortes para escolha pela ICP DAS.
Provas/argumentos técnicos: medição de erro de posição, testes de rejeição a ruído e compliance com normas são usados para validar desempenho. Métricas relevantes incluem repetibilidade (<±1 µm em trechos curtos), latência determinística e número de ciclos entre falhas (MTBF). Para aplicações que exigem essa robustez, a série placa de controle de movimento 4 eixos da ICP DAS é a solução ideal. Confira as especificações em https://www.lri.com.br/aquisicao-de-dados/placa-controle-de-movimento-4-eixos-puso-geral.
Guia prático de instalação e configuração — Como usar a Placa de Controle de Movimento 4 Eixos
Roteiro prático: 1) validar requisitos elétricos e de espaço; 2) montar fisicamente com aterramento adequado; 3) conectar encoders, drivers e I/Os; 4) configurar parâmetros de movimento e testar. Mantenha logs e etiquetas para rastreabilidade.
H3: Pré-requisitos e checklist de segurança
- Requisitos de alimentação: fonte 24 V DC regulada, fusíveis e PFC para alimentação AC.
- Ferramentas: multímetro, osciloscópio, torquímetro e ferramentas ESD.
- Segurança: seguir diretrizes ESD, isolamento de redes e procedimentos de lockout/tagout.
H3: Instalação física e cabeamento (passo a passo)
1) Fixe a placa no slot ou rack, respeitando torque recomendado para conectores; 2) Conecte terra da carcaça ao barramento de terra da máquina; 3) Use cabos trançados e malha para encoders e mantenha separação de cabos de potência. Exemplo de conexão: Pulse/Dir → driver stepper; Encoder ABZ → entrada TTL/RS422; Limites e Home → entradas digitais com filtro RC se necessário.
H3: Configuração de firmware, parâmetros e calibração inicial
Parâmetros essenciais: velocidade máxima (mm/s ou rev/s), aceleração (mm/s²), ganho do servo (P/I/D), contagem por volta do encoder e microstepping. Calibração inicial: executar rotina de homing, definir limites de software/hardware e validar movimento com jog de baixa velocidade. Comandos de teste: jog positivo/negativo, ciclo de interpolação linear entre pontos e verificação de sincronismo multi-eixo.
H3: Exemplos de código e scripts de inicialização | placa de controle de movimento 4 eixos
Snippets típicos incluem inicialização do driver via SDK, habilitar eixos, configurar perfil trapezoidal e executar movimento. Exemplo (pseudocódigo): init(); set_encoder(1, 1000000); set_accel(1, 5000); move_abs(1, 10000). Consulte SDKs ICP DAS e exemplos no repositório do fornecedor; adaptadores para PLC via Modbus/OPC UA são comuns.
Integração com sistemas SCADA, IIoT e protocolos industriais
Roteiro técnico: integrar a placa com camada de supervisão (SCADA) e gateway IIoT para telemetria, alarmes e manutenção preditiva. Use protocolo adequado conforme necessidade de determinismo e largura de banda. Implementar buffer de dados e política de retenção para análises em nuvem.
H3: Protocolos e drivers suportados (Modbus, OPC UA, MQTT, EtherCAT?)
A placa normalmente suporta drivers proprietários e gateways para Modbus TCP/RTU e OPC UA; versões com EtherCAT/Real-time Ethernet são indicadas quando há demanda por sincronização sub-ms. Para telemetria IIoT, MQTT é usado via gateway interposto. Escolha do protocolo: Modbus para simplicidade, OPC UA para semântica e MQTT/REST para nuvem.
H3: Integração com SCADA populares (ex.: Ignition, WinCC, Advantech)
Fluxo de integração: mapear tags de posição/estatus para o SCADA, configurar alarms e historização. Em Ignition, usar OPC UA ou driver Modbus; em WinCC, usar OPC/Modbus e criar telas com perfis de movimento e logs. Exemplos de dashboards incluem gráficos de posição/velocidade e KPIs de disponibilidade.
H3: Segurança, redes e boas práticas IIoT
Segmentação de rede (VLAN), autenticação com certificados e criptografia TLS para telemetria são recomendadas. Implementar políticas de controle de acesso (RBAC), atualizações gerenciadas e monitoramento de integridade. Mitigações de falhas incluem watchdogs, redundância de comunicação e fallback local para segurança funcional.
Exemplos práticos de uso da Placa de Controle de Movimento 4 Eixos — Casos de aplicação e estudos de caso
Apresentamos 3 casos representativos com topologia, configuração e resultados esperados para validar implementação em campo. Cada caso traz lições aprendidas e parâmetros típicos de ajuste para replicação.
H3: Caso 1 — Sistema pick-and-place de alta repetibilidade
Objetivo: alcançar repetibilidade sub-50 µm em ciclo de 1000 cph. Topologia: 2 eixos de posicionamento XY + indexador rotativo + cabeça de pick. Configuração: perfil de aceleração alto, P/D tuning para servo, filtro mecânico para amortecimento. Resultado: aumento de rendimento e redução de retraba lhos.
H3: Caso 2 — Linha de embalagem sincronizada com esteira e cortes indexados
Objetivo: sincronizar transporte com cortador indexado. Topologia: 3 eixos sincronizados (esteira, posicionador, cortador). Configuração: uso de triggers digitais para sincronismo, sincronização por encoder mestre, tolerância de tempo <2 ms. Lições: atenção a jitter e uso de buffer prefetch para evitar perda de passo.
H3: Caso 3 — Integração com robô colaborativo e supervisão IIoT
Objetivo: coordenação entre controlador de movimento e robô cobot para montagem assistida. Topologia: controlador 4 eixos + robô via EtherCAT/OPC UA + gateway MQTT para nuvem. Desafios: segurança funcional, zones de trabalho e latência. Resultado: telemetria em tempo real e redução de tempos de setup.
Comparação técnica com produtos similares da ICP DAS e análise de escolhas
Tabela comparativa: avalie modelos em termos de número de eixos, I/Os, tipo de comunicação e determinismo. Alguns modelos priorizam EtherCAT e altas taxas de atualização, outros priorizam maior quantidade de I/Os e integração analógica.
H3: Matriz de trade-offs (capacidade de eixos, I/O, comunicação, determinismo)
Critérios de seleção: se você precisa de alta sincronização sub-ms, prefira modelos EtherCAT; para integração simples com PLC, escolha modelos Modbus/OPC UA. Capacidade de corrente e compatibilidade de encoder definem o escopo de aplicação.
H3: Erros comuns de seleção e projeto ao usar placas ICP DAS
Erros típicos: subdimensionamento de corrente do driver; incompatibilidade de níveis de encoder (TTL vs RS422); falta de filtro anti‑ruído; não validação de MTBF para operação 24/7. Evite-os realizando testes em bancada, checando datasheet e consultando suporte técnico.
Troubleshooting, manutenção e boas práticas operacionais
Guia de diagnóstico: interpretar LEDs de status, logs do controlador e sinais de erro do drive. Ferramentas úteis incluem osciloscópio para verificar sinais pulse/dir e analisadores de protocolo para redes industriais.
H3: Lista de erros comuns, causas e soluções rápidas
- Problema: perda de passos. Causa provável: aceleração muito alta ou corrente insuficiente. Solução: reduzir aceleração, aumentar corrente nominal do driver.
- Problema: ruído em encoder. Causa: cabeamento próximo a cabos de potência. Solução: refazer cabeamento trançado e aterramento.
- Problema: comunicação intermitente. Causa: conflitos IP ou interferência. Solução: segmentar rede, checar integridade física.
H3: Atualização de firmware e recuperação de emergência
Procedimento seguro: fazer backup das configurações, usar versão de firmware testada em bancada, verificar checksum e manter rotina de rollback. Em recuperação, utilize modo bootloader e suporte técnico da ICP DAS para recuperar imagens corrompidas.
Conclusão técnica e chamada para ação — Entre em contato / Solicite cotação
Resumo executivo: a placa de controle de movimento 4 eixos da ICP DAS combina precisão, robustez e integração com protocolos industriais, sendo indicada para aplicações que requerem sincronização multi-eixo e telemetria IIoT. Vantagens competitivas incluem suporte técnico, documentação e conformidade com normas industriais.
Chamada para ação: para aplicações que exigem essa robustez, a série placa de controle de movimento 4 eixos da ICP DAS é a solução ideal. Confira as especificações e solicite proposta técnica em https://www.lri.com.br/aquisicao-de-dados/placa-controle-de-movimento-4-eixos-puso-geral. Para avaliação comparativa e POC, entre em contato com o time técnico da LRI e solicite amostra para testes.
Instruções para cotação: informe número de eixos, tipos de enkoders/servos, ambiente de operação (temperatura/umidade), protocolo de comunicação desejado e quantidade de I/Os digitais/analógicos. Isso acelera o dimensionamento e proposta.
Referência: para mais artigos técnicos consulte: https://blog.lri.com.br/
Perspectivas futuras e recomendações estratégicas para a Placa de Controle de Movimento 4 Eixos
Tendências: integração nativa com edge computing, suporte a sincronização por PTP e adoção de EtherCAT/TSN para reduzir jitter. A convergência entre motion control e IIoT permitirá manutenção preditiva baseada em ML e telemetria continua.
Aplicações emergentes: manufatura aditiva com multi-eixos sincronizados, inspeção por visão com trigger hardware e integração com robôs colaborativos em linhas flexíveis. Recomendação estratégica: começar com um POC modular e escalar via gateways IIoT, mantendo padrões abertos (OPC UA, MQTT).
Sugestões de adoção escalável: padronizar cablagem e conectorização, implementar segmentação de rede desde projeto e incluir testes de EMC/MTBF no plano de qualificação. Para documentação técnica e tutoriais complementares, consulte outros artigos do blog LRI: https://blog.lri.com.br/ e materiais de integração.
Incentivo à interação: se tiver dúvidas sobre seleção, dimensionamento ou integração da placa de controle de movimento 4 eixos, pergunte nos comentários abaixo ou solicite uma análise de aplicação com nossos engenheiros. Sua pergunta pode ajudar outros integradores — comente e compartilhe sua experiência.



