
Introdução ao placa de controle de movimento 4 eixos da ICP DAS — O que é a placa de controle de movimento 4 eixos da ICP DAS?
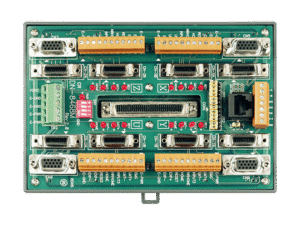
A placa de controle de movimento 4 eixos da ICP DAS é um módulo de motion control projetado para integrar com PLCs, PCs industriais e controladores Mitsubishi, oferecendo controle determinístico de até quatro eixos por placa. Destinada a engenheiros de automação, integradores de sistemas e equipes de manutenção, sua arquitetura combina entradas/saídas digitais, interfaces para encoders e saídas PWM/step-dir para drives de passo ou servo. Desde aplicações de pick-and-place até máquinas CNC leves, esta placa entrega performance, precisão e facilidade de integração em ambientes industriais.
Em termos arquitetônicos, a placa agrega processamento em tempo real para perfis de movimento (trapezoidais e S-curve), funções de interpolação e sincronização entre eixos, e suporte a protocolos industriais como Modbus RTU/TCP e RS-485. O design considera requisitos de EMC/segurança conforme normas como IEC/EN 62368-1 (segurança eletroeletrônica) e recomendações de imunidade IEC 61000-6-2/4 para ambientes industriais, garantindo robustez contra ruído e transientes. Conceitos como determinismo, resolução de encoder, fator de potência (PFC) e MTBF são centrais para a seleção e avaliação do equipamento.
Ao escolher esta placa, o leitor busca uma solução que reduza tempo de integração, minimize retrabalho de cabeamento e ofereça previsibilidade operacional sob cargas variáveis. Este artigo técnico aprofunda especificações, formas de uso, integração com SCADA/IIoT e cuidados críticos de instalação, servindo como guia prático para projetistas e compradores técnicos que precisam justificar decisões de aquisição com métricas e normas.
Visão geral técnica rápida do placa de controle de movimento 4 eixos da ICP DAS
A placa inclui componentes principais como: processador de tempo real (FPGA/MCU), interface de alimentação com PFC, buffers para sinais de encoder, driver de sinais step/dir e circuitos de isolamento galvanicamente. Em termos de I/O, é comum encontrar entradas digitais para limites e home, saídas a relé/solid-state para freios e sinais de fault, além de canais analógicos opcionais para controle de velocidade por tensão. Essas peças formam a espinha dorsal da placa e definem capacidade de integração em múltiplas arquiteturas de automação.
Interfaces suportadas tipicamente são: RS-232/RS-485, Modbus RTU/TCP, CANopen (quando aplicável) e, para integração direta com máquinas Mitsubishi, protocolos proprietários ou gateways. A compatibilidade com encoders incrementais e absolutos (A/B/Z, SSI, EnDat) é essencial para garantir precisão. A placa provê também sincronização com PLCs via entradas/saídas digitais de alta velocidade e, frequentemente, suporte a watchdogs e supervisão por firmware atualizável.
No aspecto de motion control, as funcionalidades incluem controle de até 4 eixos, interpolação linear e circular básica, perfis trapezoidais e S-curve, além de funções auxiliares como homing automático, torque limiting e detecção de stalling. A taxa de atualização e a latência determinam o grau de determinismo; para aplicações industriais é comum exigir update rates de 1 ms ou inferiores para controle fluido e sincronização rígida entre eixos.
Arquitetura de hardware e conexões principais
A arquitetura combina um controlador de movimento em tempo real com interfaces físicas isoladas (optoacopladores/transformadores) para entradas/saídas, conectores robustos (screw terminal ou D-sub) e blocos de distribuição para alimentação. Conectividade de encoder e sinais de motor é separada fisicamente para reduzir ruído.
Protocolos de comunicação e compatibilidade (Modbus, RS-485, etc.)
Suporta Modbus RTU/TCP, RS-485 para redes seriais industriais e possivelmente CANopen para aplicações distribuídas. Drivers para PLCs comuns facilitam integração com ladder e blocos funcionais.
Resumo de recursos de motion control (eixos, interpolação, perfil de movimento)
Inclui até 4 eixos, interpolação linear/circular (2D/3D limitada conforme firmware), perfis trapezoidais e S-curve, e funções de homing, limit switches e limitadores de corrente/velocidade.
Principais aplicações e setores atendidos pela placa de movimento ICP DAS
A placa atende fortemente setores como manufatura, embalagens, automação de processos, utilities e OEMs que demandam controle preciso de posicionamento. Em linhas de produção, ela reduz variabilidade e aumenta taxa de throughput por permitir movimentos sincronizados de múltiplos eixos. Para buyers técnicos, a previsibilidade de performance e suporte a normas industriais tornam-na atraente.
No segmento de utilities e energia, a placa é útil em sistemas de comutação e posicionamento de válvulas e amortecedores, onde MTBF, diagnósticos e conformidade com normas EMC são críticos. Em aplicações de OEM, a modularidade reduz tempo de desenvolvimento e facilita certificações sob IEC/EN 62368-1.
Para IIoT e Indústria 4.0, a placa fornece telemetria de movimento (posições, erros, correntes), integrável a plataformas de analytics para manutenção preditiva e otimização por AI. A capacidade de exportar dados via Modbus/TCP ou gateways MQTT permite integração com SCADA e data lakes.
Automação industrial e robótica de pick-and-place
Em pick-and-place, os quatro eixos suportam posicionamento XYZ+rolagem ou plataformas rotativas, com homing rápido e alta repetibilidade. Perfis S-curve reduzem vibração em acelerações bruscas.
Máquinas CNC leves e sistemas de corte/gravura
Para CNC light, a placa oferece interpolação e sincronização entre eixos, permitindo cortes precisos em materiais comuns. Limites de corrente e compatibilidade com encoders garantem qualidade de acabamento.
Embalagem, montagem e inspeção automatizada
Em linhas de embalagem, a sincronização com transportadores e sensores garante alinhamento e qualidade. Integração com visão industrial e I/O para rejeição automática é direta.
Aplicações em HVAC, logística e teste/medição
Uso em dampers HVAC, posicionamento de vãos logísticos e rigs de teste automatizados, especialmente onde repetibilidade e integração com SCADA são exigidas.
Especificações técnicas detalhadas do placa de controle de movimento 4 eixos — Tabela resumida placa controle movimento 4 eixos, ICP DAS
Abaixo tabelas resumidas para consulta rápida por projetistas e compradores. Campos exemplificativos; consulte ficha técnica para valores exatos.
Tabela: Alimentação, consumo, dimensões, temperatura de operação
| Item | Especificação típica |
|---|---|
| Alimentação | 24 Vdc ±10% (com PFC recomendado) |
| Consumo | Depende carga; placa ≈ 2–5 W (sem motores) |
| Dimensões | Ex.: 160 x 100 x 40 mm (varia por modelo) |
| Temperatura operação | -20°C a +70°C industrial |
| MTBF estimado | >50.000 horas (dependendo de condições) |
Tabela: Entradas/saídas digitais e analógicas, encoder, PWM e Sinais de controle
| Canal | Tipo |
|---|---|
| Entradas digitais | 8–16 TTL/isoladas (home, limites, E-stop) |
| Saídas digitais | 4–8 (relé/SSR/TTL) |
| Entradas analógicas | 2 (0–10 V / 4–20 mA opcional) |
| Encoder | Incremental A/B/Z; suporte SSI/EnDat opcional |
| Saídas motor | Step/Dir (TTL), PWM para drives servo |
Tabela: Precisão, resolução, taxa de atualização e limites de corrente/voltagem
| Parâmetro | Valor típico |
|---|---|
| Resolução | Depende do encoder; até 1 μstep (microstepping) |
| Precisão posicional | Sub-milímetro com encoder adequado |
| Update rate | 1 ms ou melhor (hard real-time) |
| Limite de sinal | Step/Dir TTL 5 V; encoder 5 V/24 V (opcional) |
Importância, benefícios e diferenciais do produto ICP DAS
Escolher uma solução dedicada de motion control reduz tempo de projeto frente a soluções DIY ou genéricas. A placa ICP DAS oferece determinismo, diagnósticos integrados e compatibilidade com PLCs, reduzindo necessidade de hardware adicional e simplificando validação de segurança. Benefícios mensuráveis incluem redução de tempo de integração e menor MTTD/MTTR graças a logs e telemetria.
Em integração com PLCs Mitsubishi, os blocos funcionais e drivers prontos aceleram testes e colocação em serviço, além de facilitar certificações em máquinas que precisam cumprir normas como IEC 61800-5-1 (segurança elétrica de drives). O suporte a encoders e frequências de atualização optimizadas asseguram precisão e menor jitter em movimentos de alta velocidade.
Diferenciais da ICP DAS incluem suporte técnico local, firmware atualizável com histórico de releases, robustez industrial (componentização e isolamento) e documentação técnica detalhada com exemplos de aplicação. Esses fatores diminuem custo total de propriedade (TCO) quando comparados a alternativas não suportadas.
Benefícios operacionais: precisão, confiabilidade e determinismo
A placa entrega maior confiabilidade via watchdogs, supervisão de corrente e diagnósticos que evitam paradas inesperadas. Determinismo de update garante performance repetível.
Benefícios de integração: compatibilidade com PLCs e controladores Mitsubishi
Existem rotinas e drivers prontos para integração com ladder e redes Mitsubishi, minimizando desenvolvimento de I/O e comunicação.
Diferenciais ICP DAS: suporte técnico, robustez industrial e certificações
ICP DAS fornece documentação, firmware e suporte certificado, além de componentes com classificação industrial e conformidade com normas IEC.
Guia prático de instalação e configuração do placa de controle de movimento 4 eixos da ICP DAS — Passo a passo
A instalação começa com checklist: verificar tensão de alimentação, aterramento, ferragens de montagem e proteções contra sobrecorrente. Segurança elétrica e lockout/tagout são obrigatórios. Tenha à mão multímetro, ferramentas isoladas, manual de instalação e firmware mais recente.
Montagem física exige área limpa, fixação em trilho DIN ou painel, distância mínima entre fontes ruidosas e cabeamento bifilar para sinais de encoder. Use cabos shielded para encoders e sinais de motor e separe-los de linhas de potência para minimizar EMI. Aterramento sólido é crítico; siga esquema TN-S ou TT conforme planta.
Configuração de parâmetros de movimento inclui definir ganho, limites de velocidade/ aceleração, resolução de encoder e curvas de aceleração. Valide via testes de homing e jog em baixa velocidade, monitorando correntes e erros. Para aplicações com controladores Mitsubishi, utilize blocos de função para mapear tags e sincronizar prioridades.
Preparação e checklist pré-instalação (ferramentas e segurança)
Confirme alimentação 24 Vdc, fusíveis, ferramentas isoladas, e escalas de torque para fixação. Realize lockout/tagout.
Montagem física e conexão elétrica segura
Use bornes torqueados, cabos blindados e mantenha separação entre potência e sinais. Aterramento próximo ao painel.
Configuração de parâmetros de movimento (velocidade, aceleração, limites)
Ajuste perfis (S-curve), limites de segurança e ganhos; grave configuração e faça validação incremental.
Testes iniciais e validação: homing, movimento por jog e simulação
Execute homing com limites suaves, depois jog e trajetórias simuladas; colete logs e analise comportamento.
Para aplicações que exigem essa robustez, a série placa de controle de movimento 4 eixos da ICP Das é a solução ideal. Confira as especificações e solicite suporte técnico na página do produto: https://www.lri.com.br/aquisicao-de-dados/placa-controle-de-movimento-4-eixos-pmitsubishi-j2. Para outras opções de placas e módulos, visite também nosso catálogo de produtos: https://www.blog.lri.com.br/produtos/placa-motion-icp-das
Como programar e usar a placa de controle de movimento — Guia de operação avançada
Programação de perfis exige entendimento de cinemática básica e tuning de parâmetros para evitar overshoot. Perfis trapezoidais são simples de implementar; S-curve (jerk-limited) é preferível quando cargas flexíveis exigem menor vibração. Use ferramentas de simulação para validar perfis antes do teste em equipamento.
Interpolação linear e circular suportada permite trajetórias coordenadas em 2D/3D (dependendo do firmware). Para caminhos complexos, calcule waypoints offline e sincronize eixos por tempo ou posição. A integração com PLC deve priorizar determinismo: execute comandos de alto nível via Modbus e mantenha loops de controle em tempo real na placa.
Debugging requer monitoramento de variáveis críticas: posição atual, erro de posição, corrente de motor, temperatura e status de I/O. Ferramentas recomendadas incluem logs de alta resolução, osciloscópio para sinal step/dir e software de diagnóstico fornecido pela ICP DAS.
Criando perfis trapezoidais e S-curve
Defina aceleração/jerk e limite de velocidade; S-curve reduz vibração em transientes.
Interpolação linear e circular em 2D/3D
Use comandos coordenados; para circular, forneça centro, raio e sentido. Considere raio mínimo devido à dinâmica.
Sequenciamento e sincronização entre eixos
Sincronize por tempo ou posição; use master/slave ou controladores virtuais para coordenação.
Debugging e ferramentas de diagnóstico recomendadas
Use logs, oscilos e software ICP DAS; valide encoders e sinais de referência.
Integração do placa de controle de movimento 4 eixos da ICP DAS com sistemas SCADA e plataformas IIoT
A placa se integra a SCADA via drivers Modbus TCP/RTU e tags que expõem posições, erros e estados. Mapeie tags críticos (pos, vel, estado de erro) e aplique historização para análise de performance e conformidade. Em arquiteturas redundantes, considere buffers e timestamps para correlação.
Para IIoT, a estratégia típica é enviar telemetria via gateway MQTT ou OPC UA para um data lake ou platforma cloud. Dados de alta frequência (telemetria de movimento) podem ser agregados localmente para reduzir banda. Políticas de retenção e compressão garantem histórico útil para modelos de manutenção preditiva.
Segurança é crucial: implemente VLANs industriais, firewalls, listas de controle de acesso e use protocolos criptografados onde possível. Gerencie firmwares e credenciais com processos que atendam a políticas internas de cibersegurança e normas como ISA/IEC 62443.
Conectividade com SCADA — drivers e tags (ex.: Modbus TCP/RTU)
Exponha tags Modbus para SCADA; use endereçamento consistente e documentação de mapa de registers.
Estrutura para dados IIoT: telemetria, MQTT e data lakes
Agregue e publique eventos via MQTT; defina schema para telemetria e metadados (timestamps, IDs).
Estratégias de segurança e permissões na rede industrial
Implemente segmentação, autenticação forte e atualizações controladas de firmware.
Exemplos práticos de uso do placa de controle de movimento 4 eixos da ICP DAS — Casos reais e templates de aplicação
Exemplo 1: sistema pick-and-place de 4 eixos — configure eixos X/Y/Z e um eixo rotativo (theta), perfis S-curve para redução de bouncing e homing por sensor óptico. Parametrize microstepping e ajuste ganho para evitar overshoot em alta velocidade.
Exemplo 2: banda transportadora com controle sincronizado — sincronize eixo mestre (motor do transportador) com eixos de indexação usando referenciação por encoder e modos master/slave para garantir alinhamento de tempo.
Exemplo 3: máquina de teste com posicionamento repetível — use registros de posição e scripts de sequência para replicar trajetórias; capture telemetria para análise estatística de repetibilidade (Cpk, Cp).
Exemplo 1: Sistema pick-and-place de 4 eixos — diagrama e parâmetros
Diagrama lógico: PLC -> placa ICP DAS -> drivers servo/step -> motores -> encoders. Parâmetros: accel 2000 mm/s2, vel 500 mm/s, home por sensor.
Exemplo 2: Banda transportadora com controle sincronizado
Master encoder no transportador; slaves indexando com tolerância sub-mm e watchdogs para falha.
Exemplo 3: Máquina de teste com posicionamento repetível
Use logs para validar tolerância e definir PM intervals.
Para conteúdos relacionados sobre integração e IIoT, veja também estes artigos no blog da LRI: https://blog.lri.com.br/automacao-industrial e https://blog.lri.com.br/iiot
Comparação técnica: placa de controle de movimento 4 eixos da ICP DAS vs outros produtos ICP DAS e concorrentes placa controle movimento 4 eixos, ICP DAS
Comparado a outras placas ICP DAS, o modelo 4-eixos oferece um balanço entre densidade de eixos e capacidade de processamento; modelos com mais eixos podem ter latência maior ou restrições de corrente. Em relação a concorrentes, a diferenciação está no suporte e compatibilidade com ecossistema Mitsubishi, além do firmware otimizado para aplicações industriais.
Vantagens frente a controladores integrados (PLC + drive incorporado) incluem menor custo por eixo em soluções distribuídas e facilidade de retrofit. Já drives inteligentes (servo drives com controle embutido) oferecem melhor integração de segurança funcional, mas acarretam maior custo inicial e complexidade de rede.
Critérios de seleção devem considerar: precisão requerida, escalabilidade, disponibilidade de suporte local, custo total de aquisição e operação (TCO) e conformidade com normas. Para sistemas críticos, avaliar MTBF, disponibilidade de peças de reposição e SLA de suporte é determinante.
Comparativo com outras placas de motion ICP DAS — diferenças e recomendações por aplicação
Modelos com mais I/O ou interfaces fieldbus recomendados para instalações complexas; placa 4-eixos ideal para máquinas compactas.
Vantagens/limitações frente a controladores integrados e drives inteligentes
Escolha drives integrados quando segurança funcional e torque control forem prioritários; escolha placa 4-eixos para custo e flexibilidade.
Critérios de seleção: precisão, escalabilidade, suporte e preço
Defina requisitos de precisão (±µm), número de eixos, e suporte local antes de decidir.
Erros comuns, armadilhas de integração e detalhes técnicos críticos
Problemas frequentes incluem grounding inadequado causando ruído em encoders, configurações de microstepping incorretas e falhas em sincronização por latência entre PLC e placa. A maioria é evitável com checklist elétrico e testes de campo.
Erros de encoder (resolução/incorreta polaridade A/B) podem levar a perda de passos e drift posicional; sempre verifique níveis de sinal e use terminadores quando aplicável. Ajuste de ganho e filtros de posição ajuda a estabilizar sistemas com cargas elásticas.
Sincronização entre PLC e placa exige priorização de loops; delegue controle crítico de tempo para a placa e utilize o PLC para coordenação de alto nível. Documente mensagens de erro e implemente procedimentos de recuperação automática.
Problemas de grounding e ruído elétrico — mitigação
Use malha de terra única, cabos trançados blindados e separação física entre potência e sinais.
Configuração incorreta de encoder/resolução — impactos e correções
Verifique PPR, modos A/B e interfacing; reconfigure microsteps para corresponder à resolução desejada.
Sincronização entre PLC e placa — latência e prioridades
Coloque laços rápidos na placa, e use PLC apenas para setpoints e permissões.
Documentação, suporte técnico e recursos adicionais para o placa de controle de movimento 4 eixos da ICP DAS
Manuais, firmware e drivers normalmente são disponibilizados no site ICP DAS e parceiros locais. Baixe sempre a última versão do firmware e leia notas de release que detalham correções e melhorias de performance. A documentação deve conter diagramas de pinagem, tabelas de parâmetros e exemplos de código.
Bibliotecas de API e exemplos em C/C#/IEC 61131 (blocos para PLC) aceleram integração. Exemplos práticos ajudam a reduzir risco de projeto e servem como base para certificação de máquina. Consulte também whitepapers sobre EMC e segurança de motion control.
Para suporte, a ICP DAS e seus integradores autorizados oferecem canais técnicos, contratos de SLA e serviços de engenharia. Tenha à mão números de série, firmware instalado e logs para agilizar atendimento.
Onde baixar manuais, drivers e firmware
Baixe do site oficial ICP DAS ou portais de parceiros como a LRI; mantenha registro de versões.
Exemplos de código, bibliotecas e módulos de integração
APIs em C/C#, exemplos IEC 61131 e blocos Modbus já prontos são comuns; adapte conforme necessidade.
Contato e SLA de suporte ICP DAS e parceiros locais
Use canais oficiais para suporte; considere contrato SLA para aplicações críticas.
Referência: para mais artigos técnicos consulte: https://blog.lri.com.br/
Conclusão técnica e chamada à ação — Solicite cotação e suporte especializado
A placa de controle de movimento 4 eixos da ICP DAS é uma solução madura para aplicações industriais que exigem precisão, determinismo e fácil integração com PLCs e plataformas IIoT. Com conformidade a normas, suporte de firmware e telemetria pronta, ela reduz risco de integração e acelera o time-to-market. Para projetos críticos, priorize verificação de MTBF, testes EMC e planos de manutenção preditiva.
Checklist rápido de decisão inclui: número de eixos, requisitos de precisão, necessidade de interpolação, compatibilidade com PLCs e orçamentos de TCO. Caso sua aplicação exija suporte para controladores Mitsubishi, a integração é simplificada com blocos específicos e exemplos de configuração. Para aplicações que exigem essa robustez, a série placa de controle de movimento 4 eixos da ICP Das é a solução ideal. Confira as especificações e faça uma solicitação de cotação aqui: https://www.lri.com.br/aquisicao-de-dados/placa-controle-de-movimento-4-eixos-pmitsubishi-j2
Se tiver dúvidas específicas sobre integração, tuning ou topologia de rede, comente abaixo ou solicite uma avaliação técnica com nossa equipe de engenharia. Incentivamos perguntas e estudos de caso — sua interação nos ajuda a produzir conteúdo técnico mais útil.
Perspectivas futuras e recomendações estratégicas para placa de controle de movimento 4 eixos da ICP DAS
Tendências apontam para maior integração com IIoT e AI, onde dados de posição e corrente alimentam modelos de otimização e manutenção preditiva. Motion optimization por aprendizado de máquina pode reduzir consumo energético e aumentar vida útil de componentes. Adoção de OPC UA e MQTT com esquemas padronizados facilita interoperabilidade em ambientes Industry 4.0.
Aplicações de alto potencial incluem microfabricação, cobots (robôs colaborativos) e sistemas de alta repetibilidade em semicondutores. Para essas áreas, recomenda-se avaliar tempo de resposta, crosstalk entre eixos e capacidade de upgrades de firmware. Planos de roadmap devem priorizar conectividade segura, telemetria rica e suporte a novos protocolos de encoder.
Recomenda-se começar com provas de conceito que validem determinismo e estabilidade, escalando conforme KPIs de rendimento e confiabilidade forem atingidos. Integre métricas de manutenção desde a fase de projeto para que modelos preditivos possam se beneficiar de dados históricos desde o comissionamento.
